Camera Calibration and Fiducial SLAM
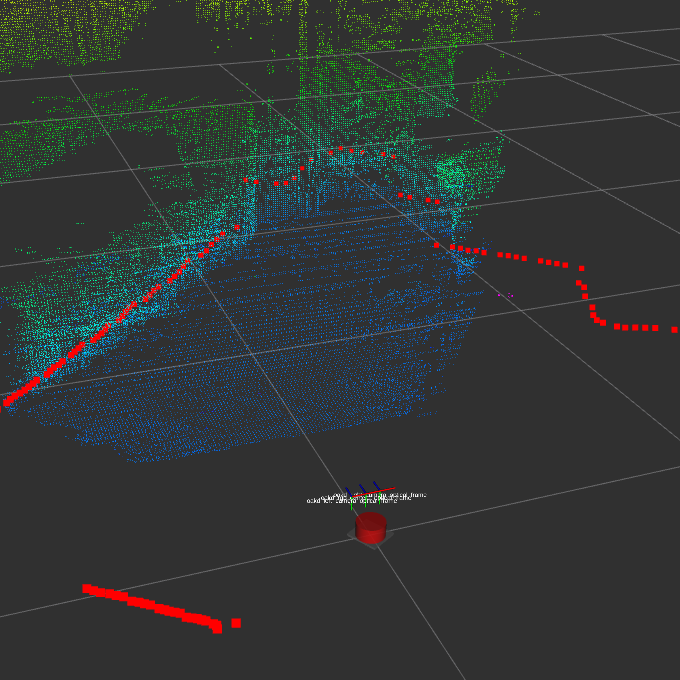
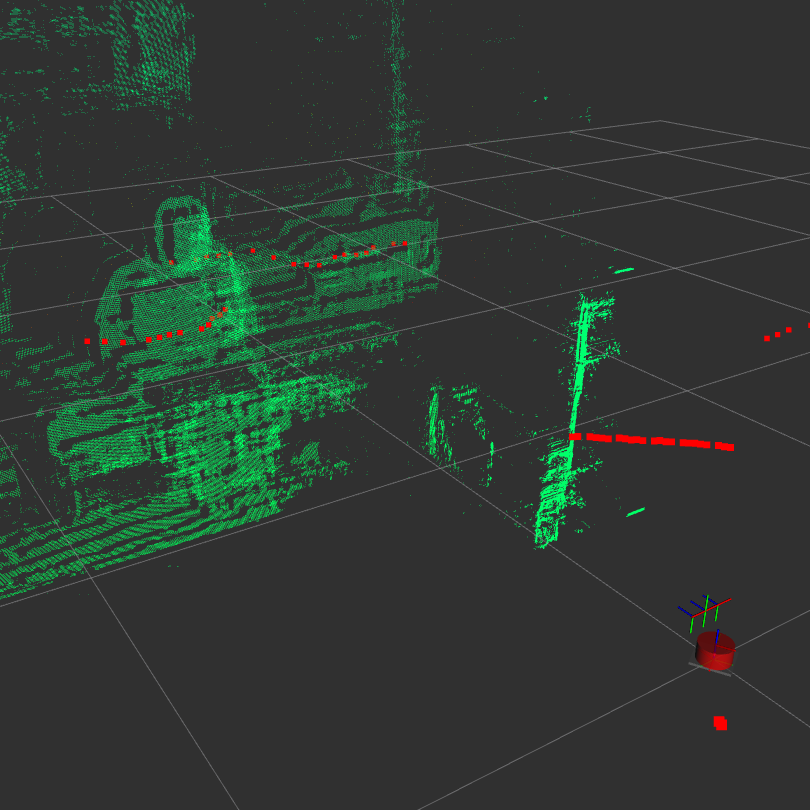
Using Aruco markers + Foxglove
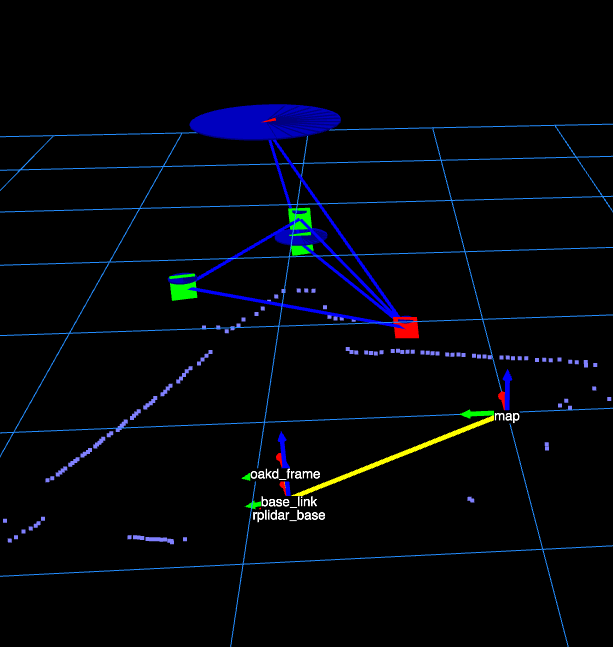
This week, I accomplished quite a few things. First, I installed a dev tool called Foxglove on my Windows laptop. This tool is essentially Rviz (+ some additional features) for Windows and connects remotely to a ROS machine. This saved me a lot of time, since I dont need to...
[Read More]