ROSCar odometry update
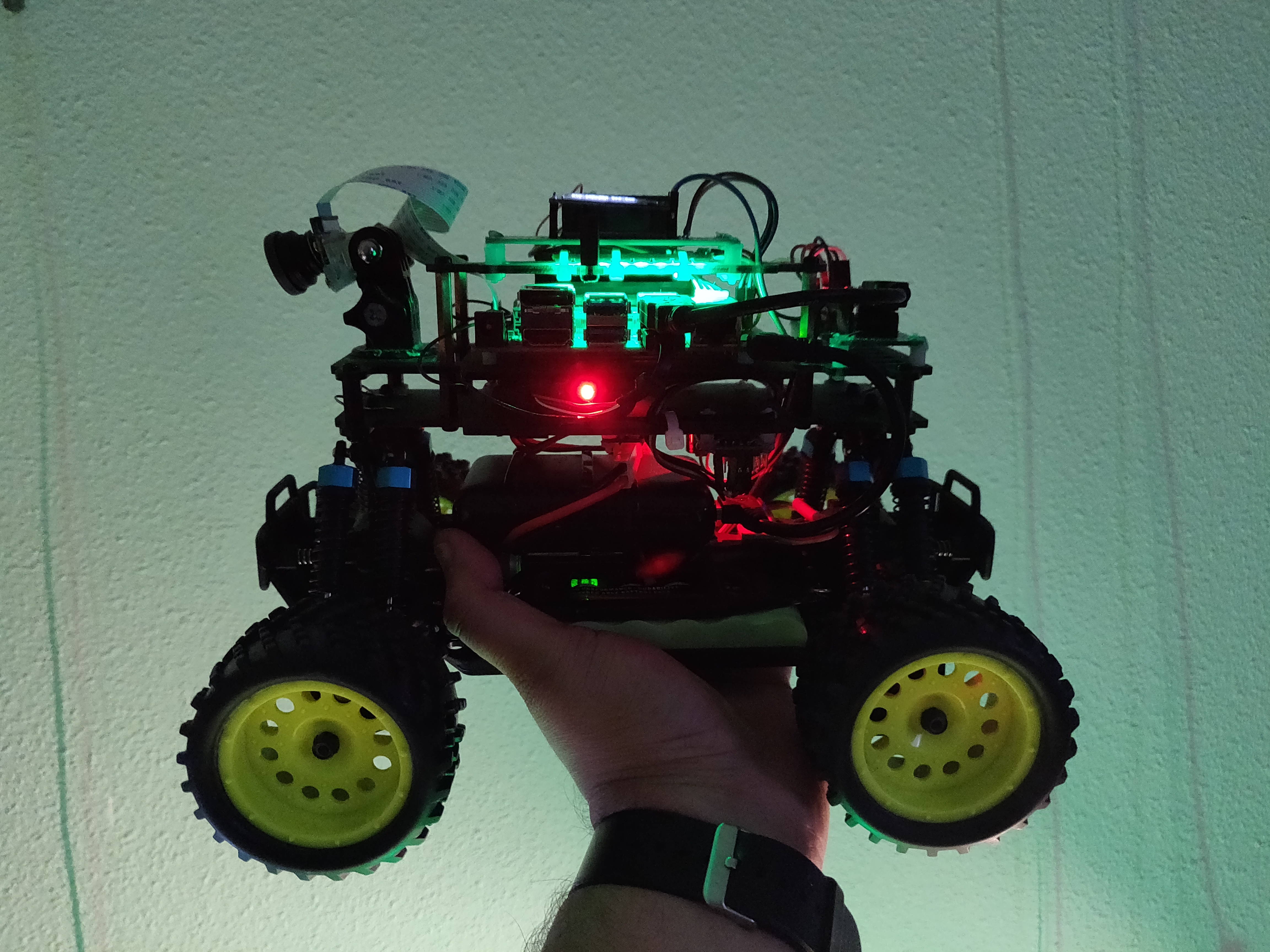
And some cool long-exposure photographs
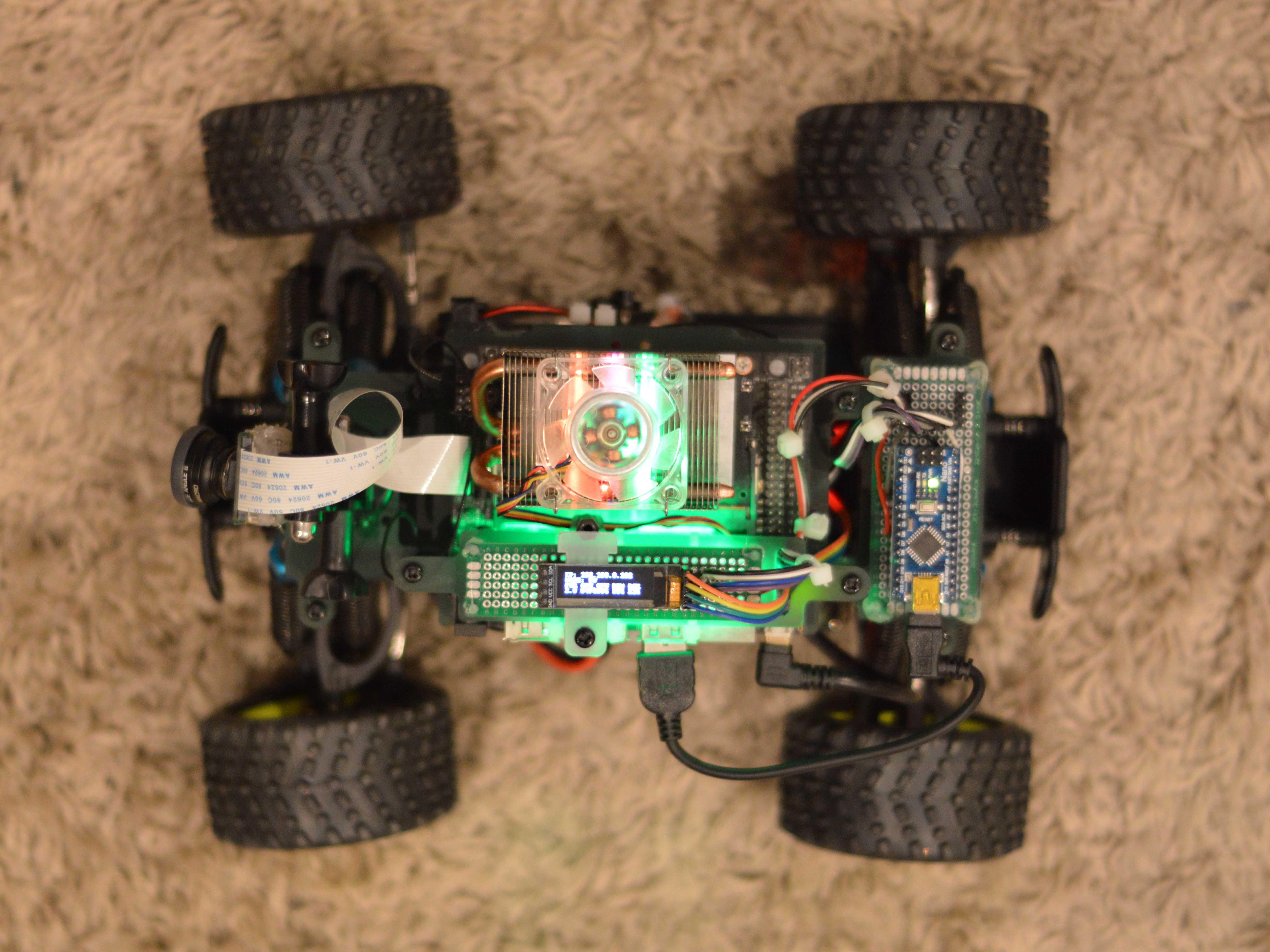
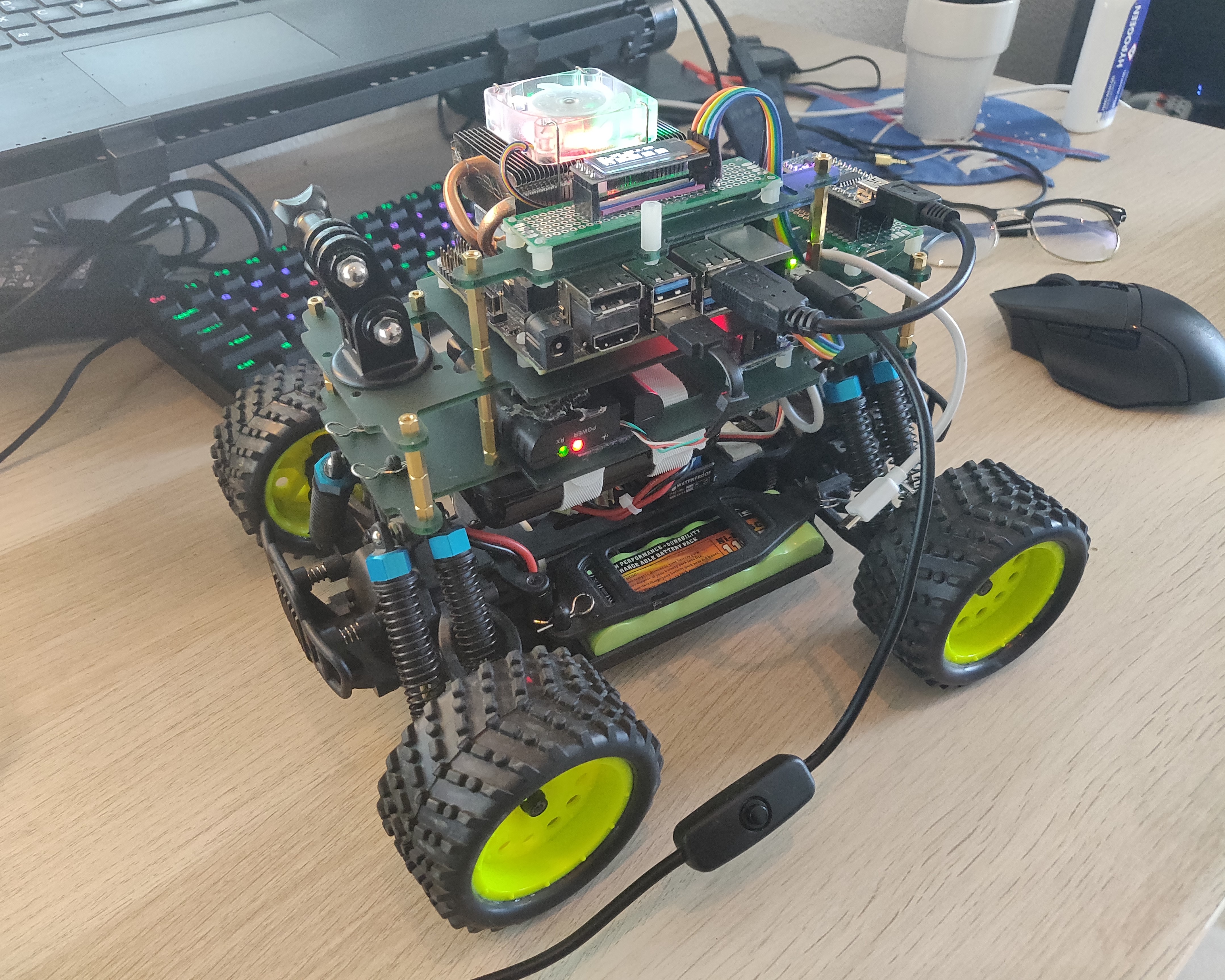
In the last update, I made some hardware changes and implemented ROS nodes for each part. Except the odometry. Since the hall-effect sensor I had operated on 5 volts and I did not have a voltage level shifter on hand, I decided to use the Arduino Nano (which I was...
[Read More]