First steps with micro-ROS (part 3)
using UDP over Ethernet
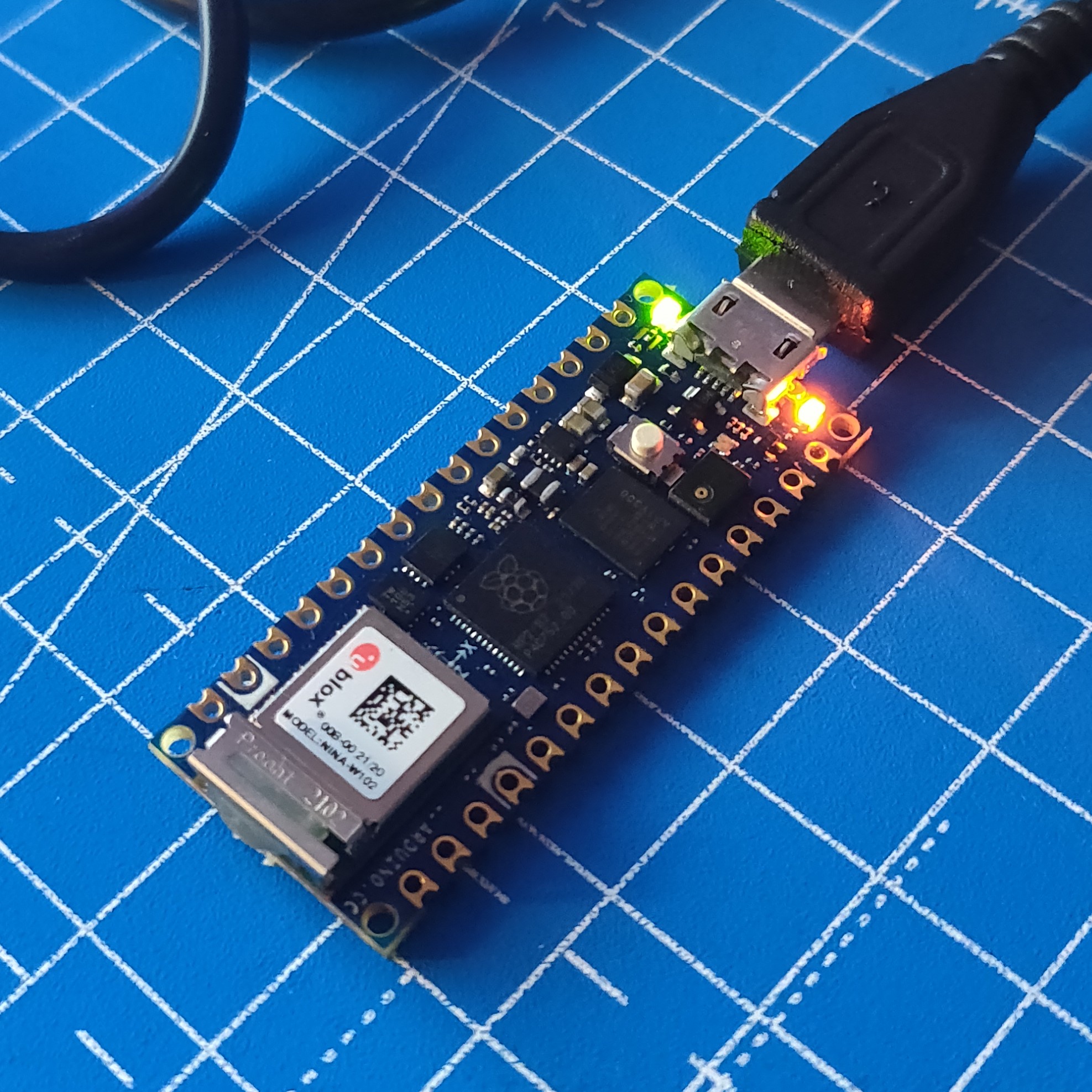
I spent some more time with the micro_ros_arduino examples throughout this week. I wanted to fix some of the issues from last week and also explore the use of UDP over Ethernet, with a Teensy 4.1 and an Arduino Portenta H7 Lite Connected. I started off by re-running some of...
[Read More]