Playing with Serial Bus Servo Motors
and updated plans for 2022

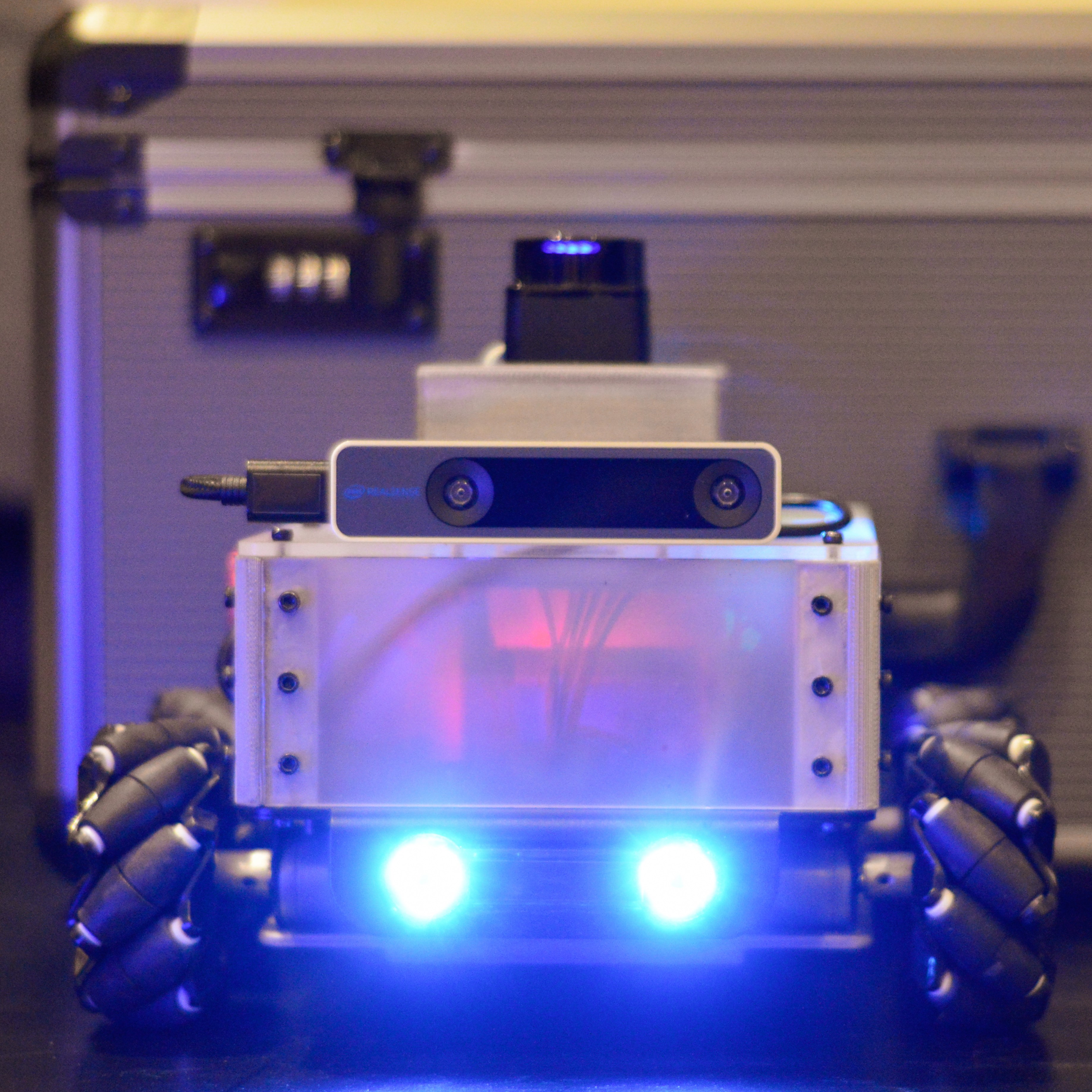
Now that the AKROS robot project is complete (not entirely, but I’m happy with its current state), it was time to put it aside and try new things. So, over the last few months, I have been ordering components and waiting for them to arrive. The parts are all finally...
[Read More]