AKROS holiday updates
New parts, OAK-D IMU, and ROS1-2 Bridge

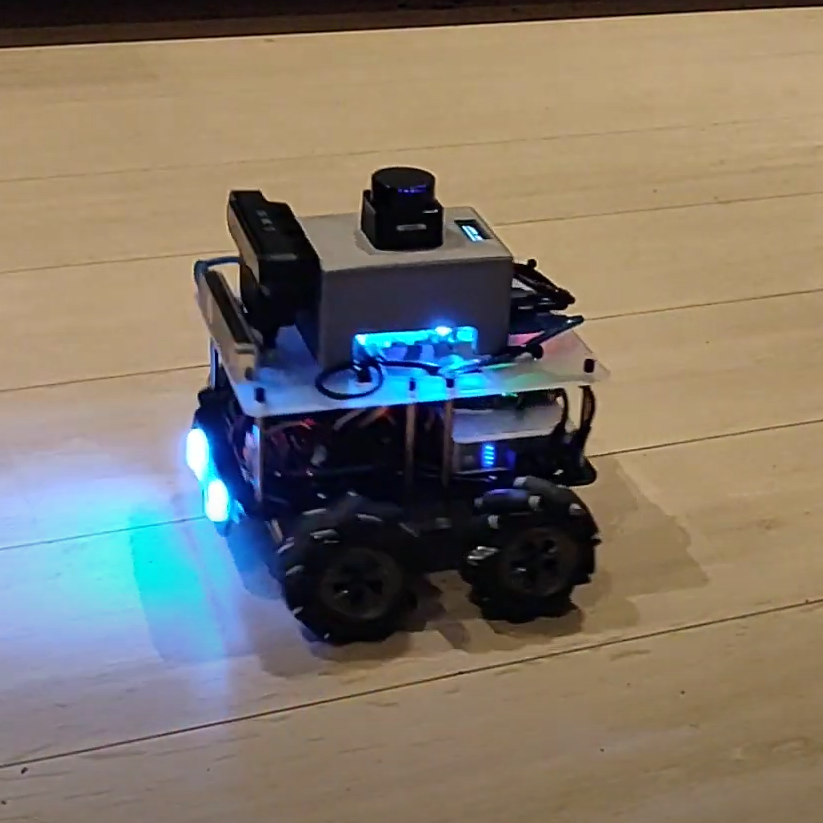
A few weeks ago, I designed a new enclosure for the bottom half of the robot. I designed it for a CNC machine, since I was supposed to attend a CNC workshop in December. Of course, this was cancelled because of the pandemic, so I decided to 3D print it...
[Read More]