Holonomic drive update
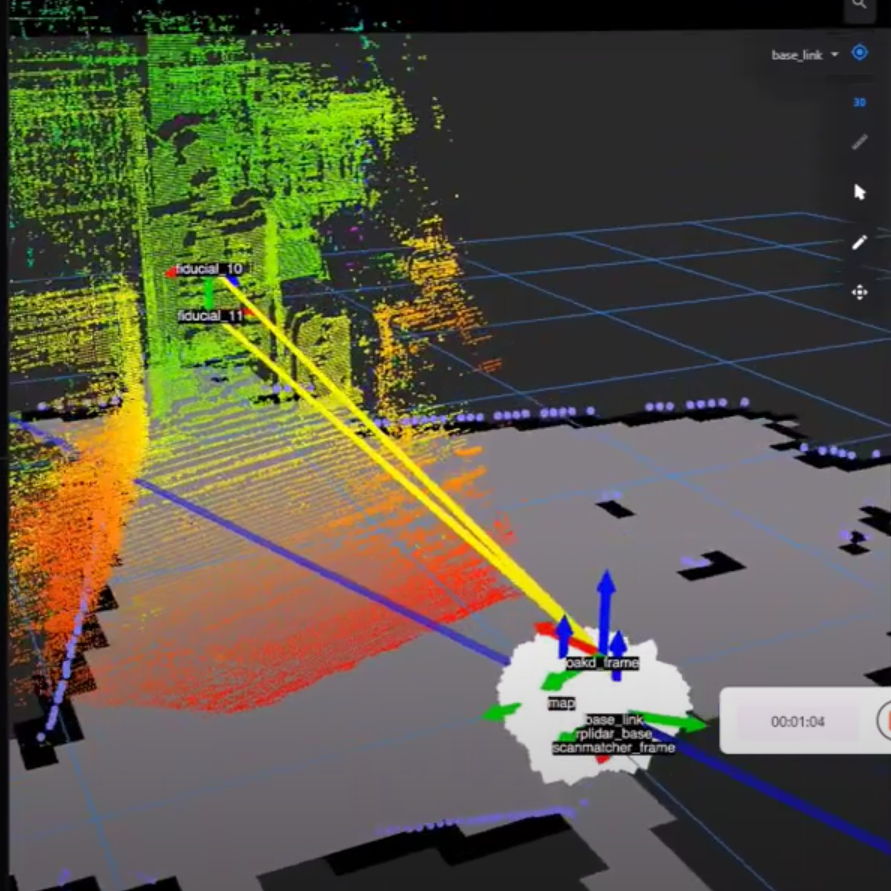
Driving using a PS4 controller + SLAM
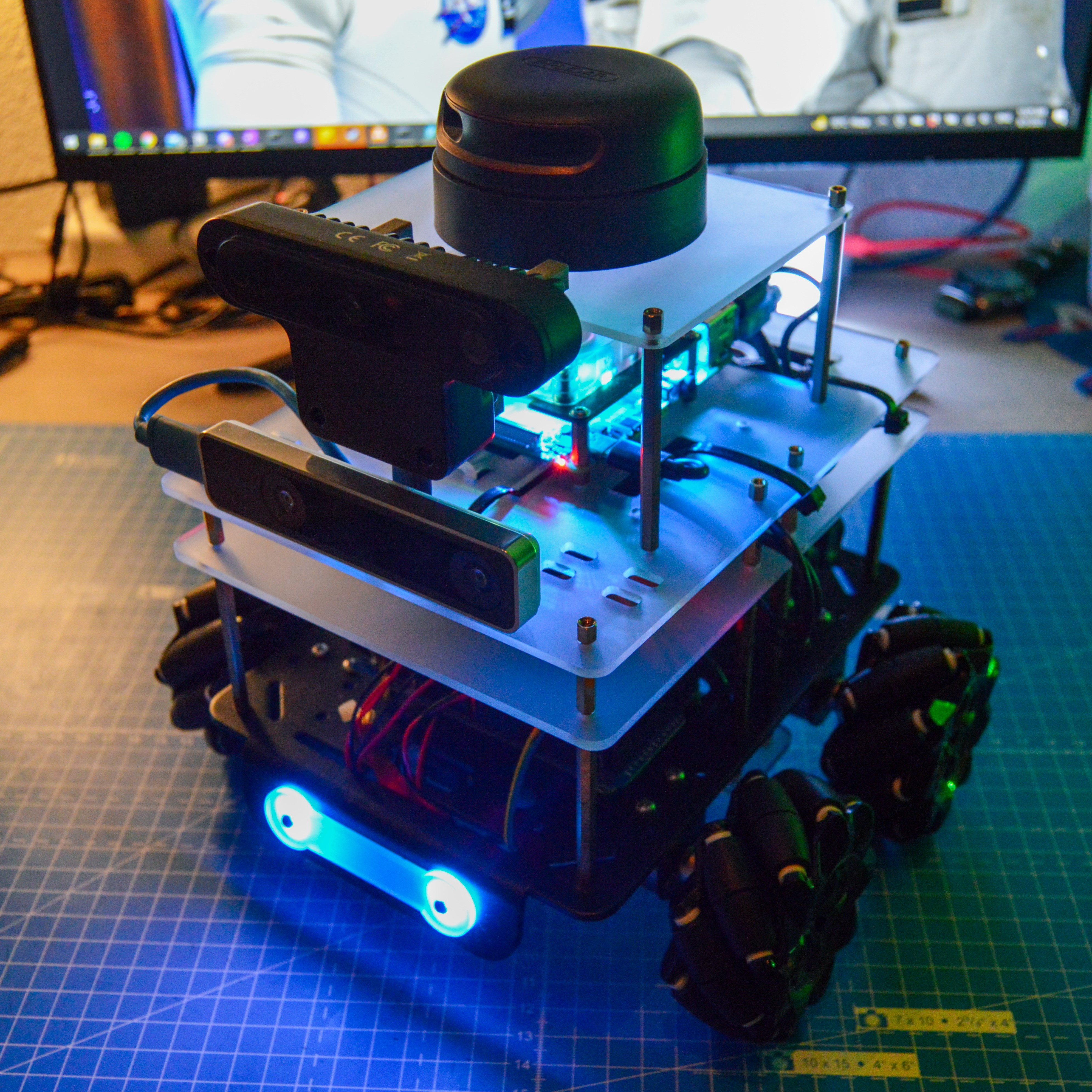
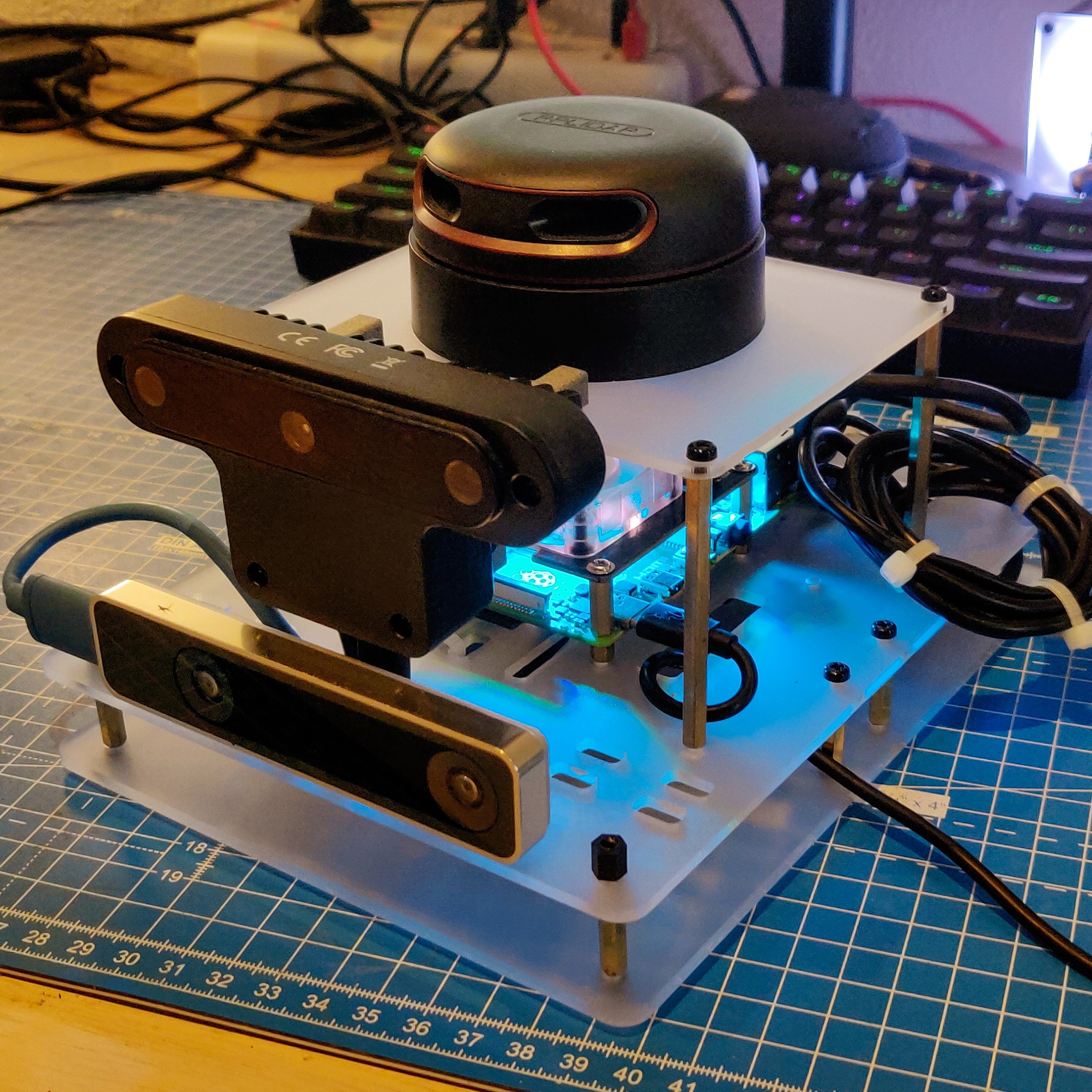
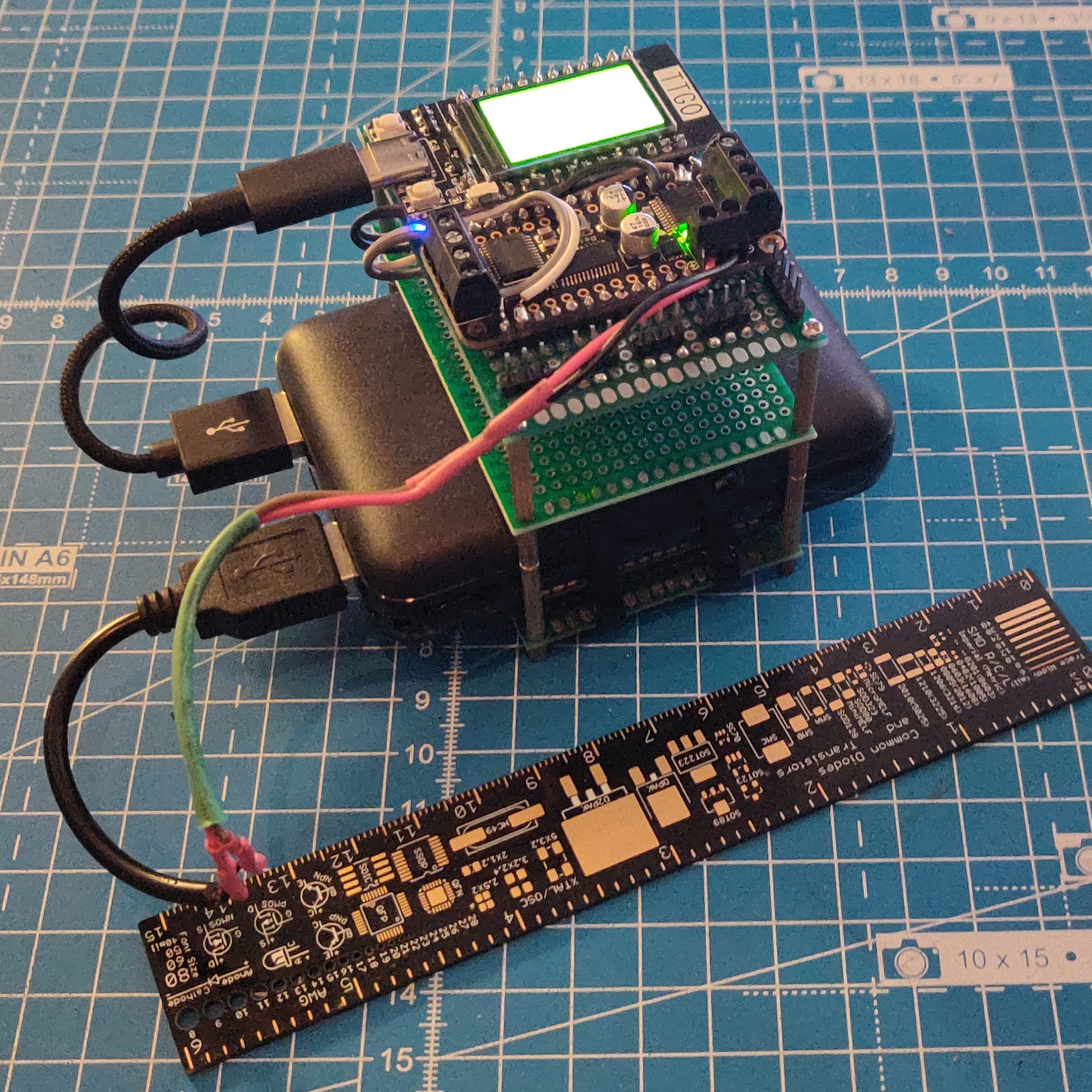
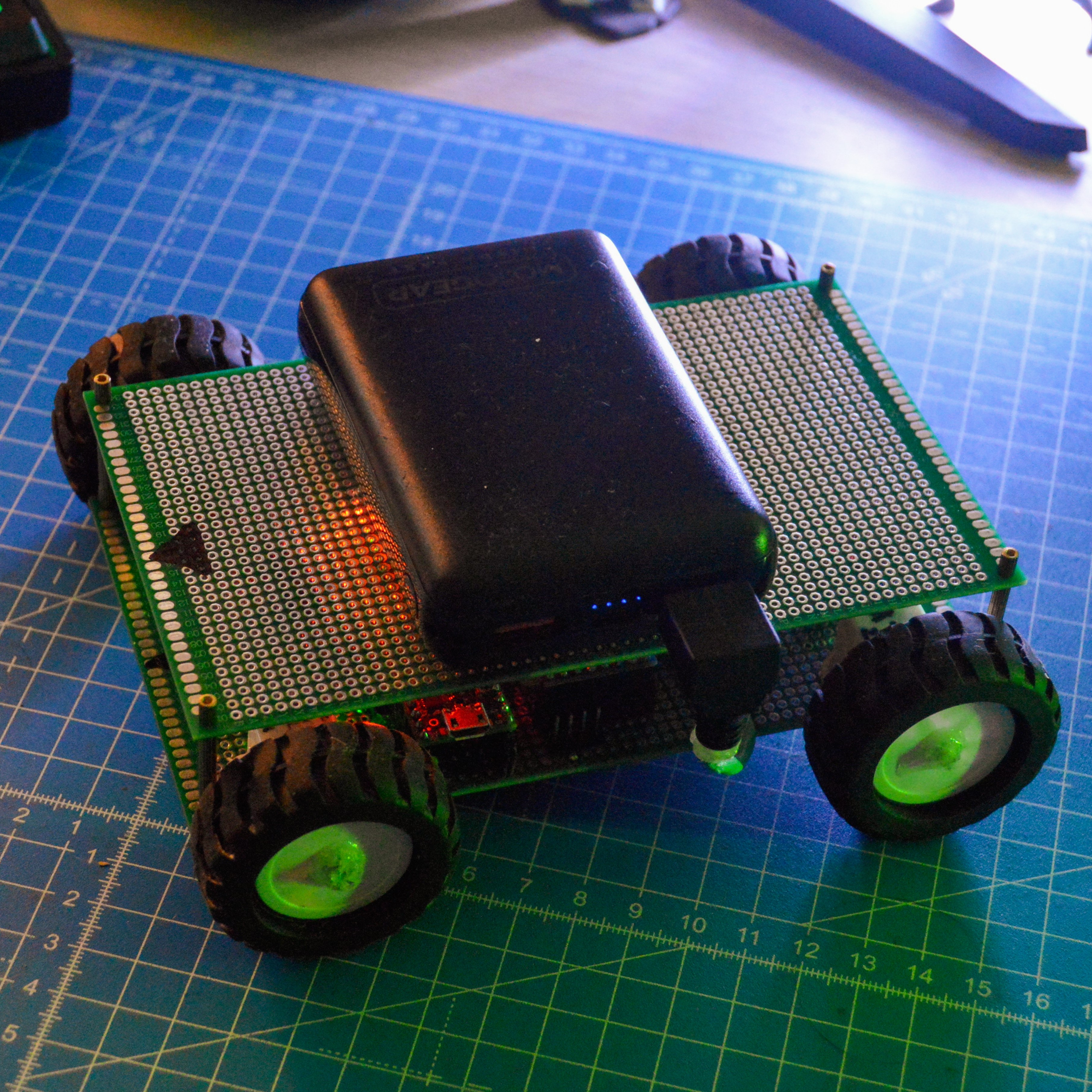
I’ve been on holiday this week, and decided to have a staycation and spare some time working on the AKROS holonomic platform. I got it back from the friend I lent it to, wired it up, tested it and assembled with the navigation module. I am not using the encoders...
[Read More]